If you come across ABS over current fault in Ubox v2 with fw5.3, then this article may be helpful.
Contents
- Background and Notes in advnace
- Preparations
- Firmware improvements : Set up in VESC Tool
- Hardware improvements(Optional)
- Compatibility with developing FW6.0
- Conclusion and Explanation
- Cautions and Liability
Background
Recently, we received serval reports back that the Ubox V2 is easier to trigger the ABS over current fault with FW 5.3. (Notes: The Premise is your motor current set up not over Ubox hardware spec) After researches and experiments, we have found that we can do these configurations to improve the robustness to Ubox v2 against this abs fault.
These configurations including the firmware configuration and hardware modification. For the hardware modification, we already cut in our productions since April 28th. (No worry for those ubox v2 shipped before this modification, it's also reliable.) And the hardware modification is optional, it depends on your needs and actual status.
All of these configurations are helps to improve, you can test each of them then decide to adopt or abandon it, if your Ubox's application had not any fault yet, you can keep it unchanged.
Preparations:
For FW configuration:
- The VESC tool, we use VESC tool 3.01 PC edition in this guide.
- A type-c USB cable.
For hardware modification:
- Ubox V2 with panel removed, a suitable inner hexagon spanner is needed.
- A knife to scrape the coating of the PCB.
- An iron and solder wire.
Firmware : Set up in VESC Tool (Set the Slow ABS current limit to True)
When doing "Setup Motor FOC", the motor configurations will be set to default, the Slow ABS current limit is default false. After the motor FOC setup, we may need to set back the "Slow Abs Current Limit" to True.
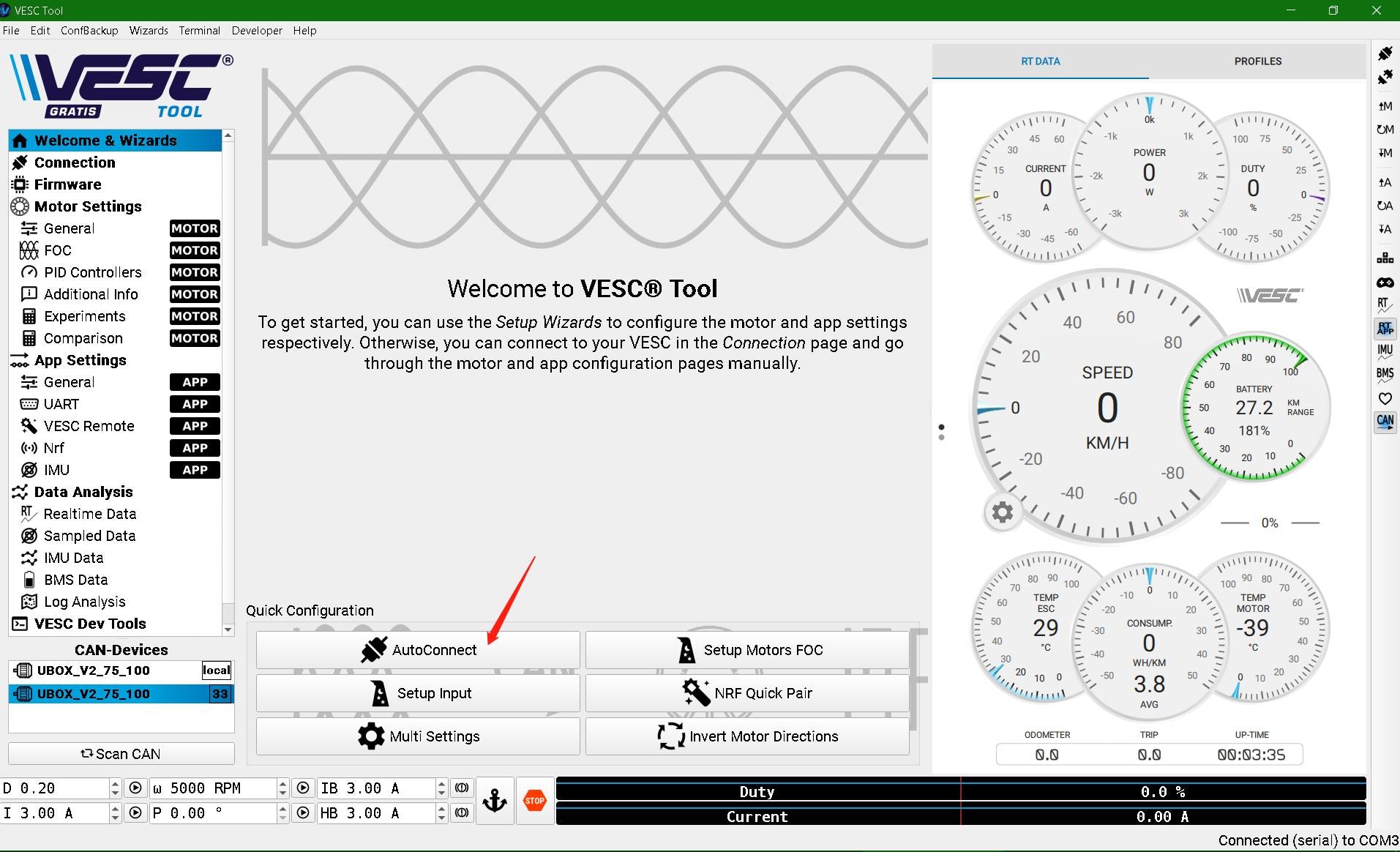
1. Power on the Ubox, connect it to the PC VESC tool with USB cable, and make connection.
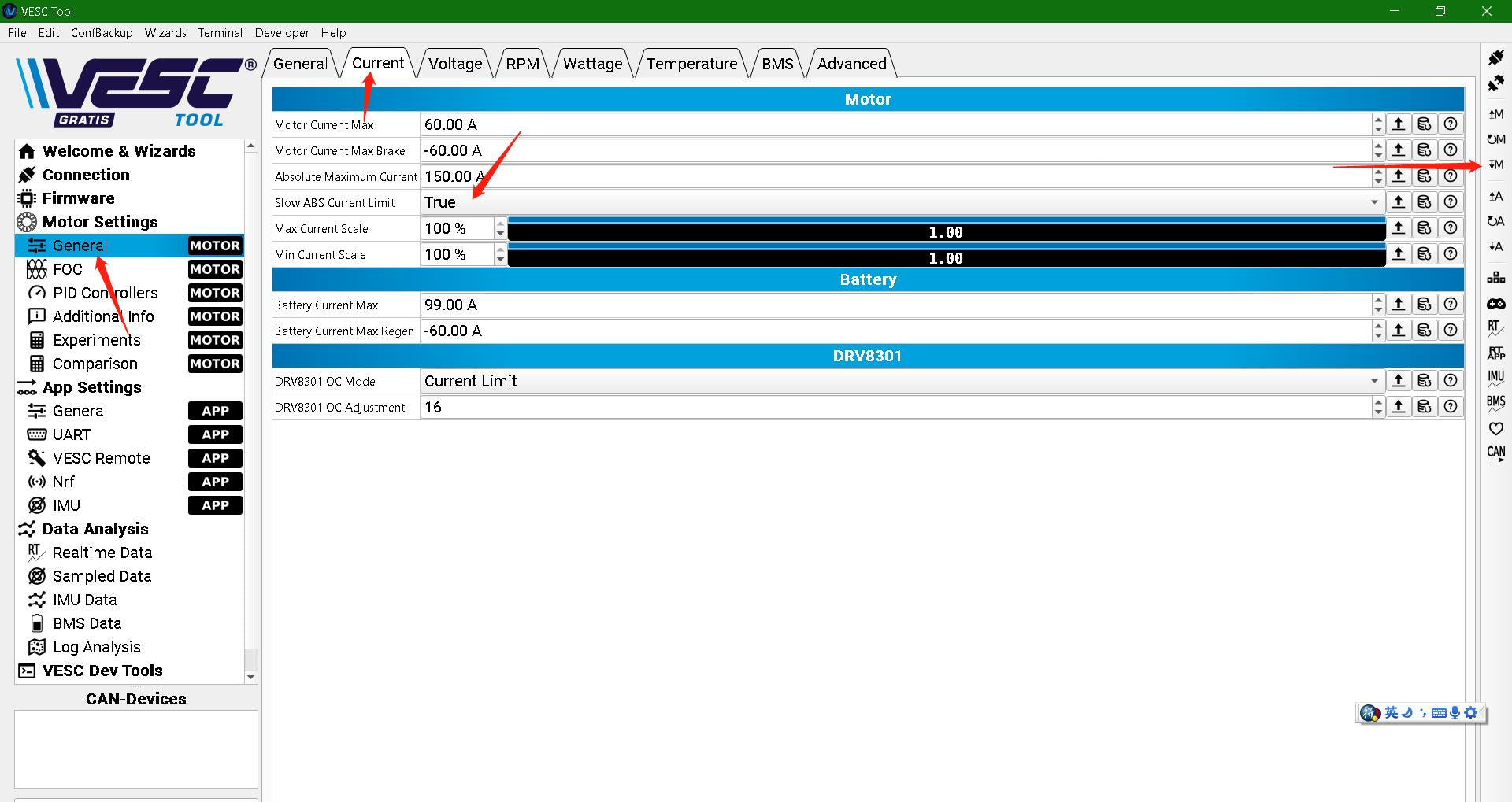
2.Then go to "Motor Settings->General->current" page to set "Slow ABS Current Limit" to true, and click "Write Motor Configuration"
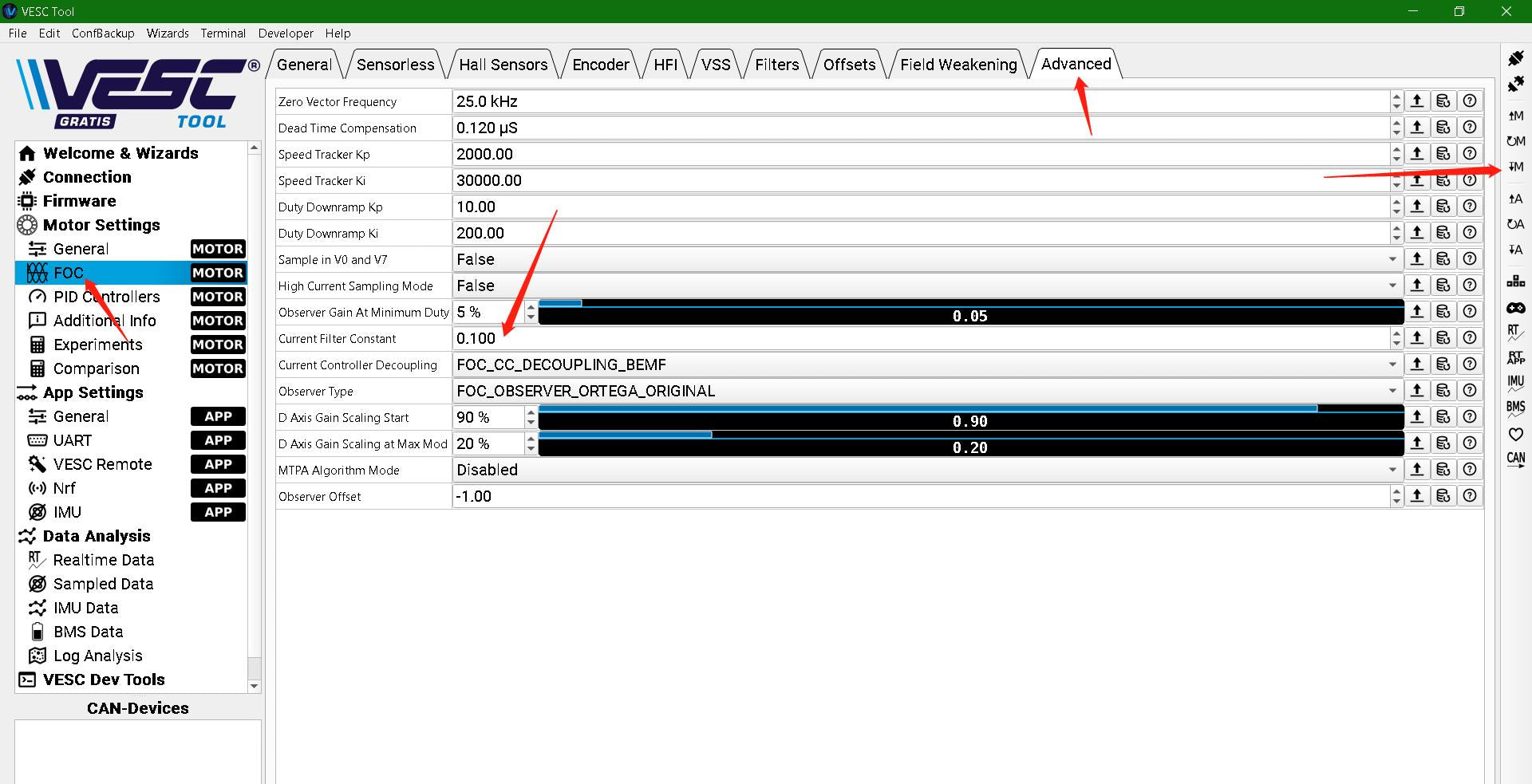
3. You can further set lower the Current Filter constant, go to "Motor Settings->FOC->Advanced" page to set "Current Filter Constant" to true, and click "Write Motor Configuration", the lower the value, the slower the fault triggers.But not too lower, the default value is good enough.
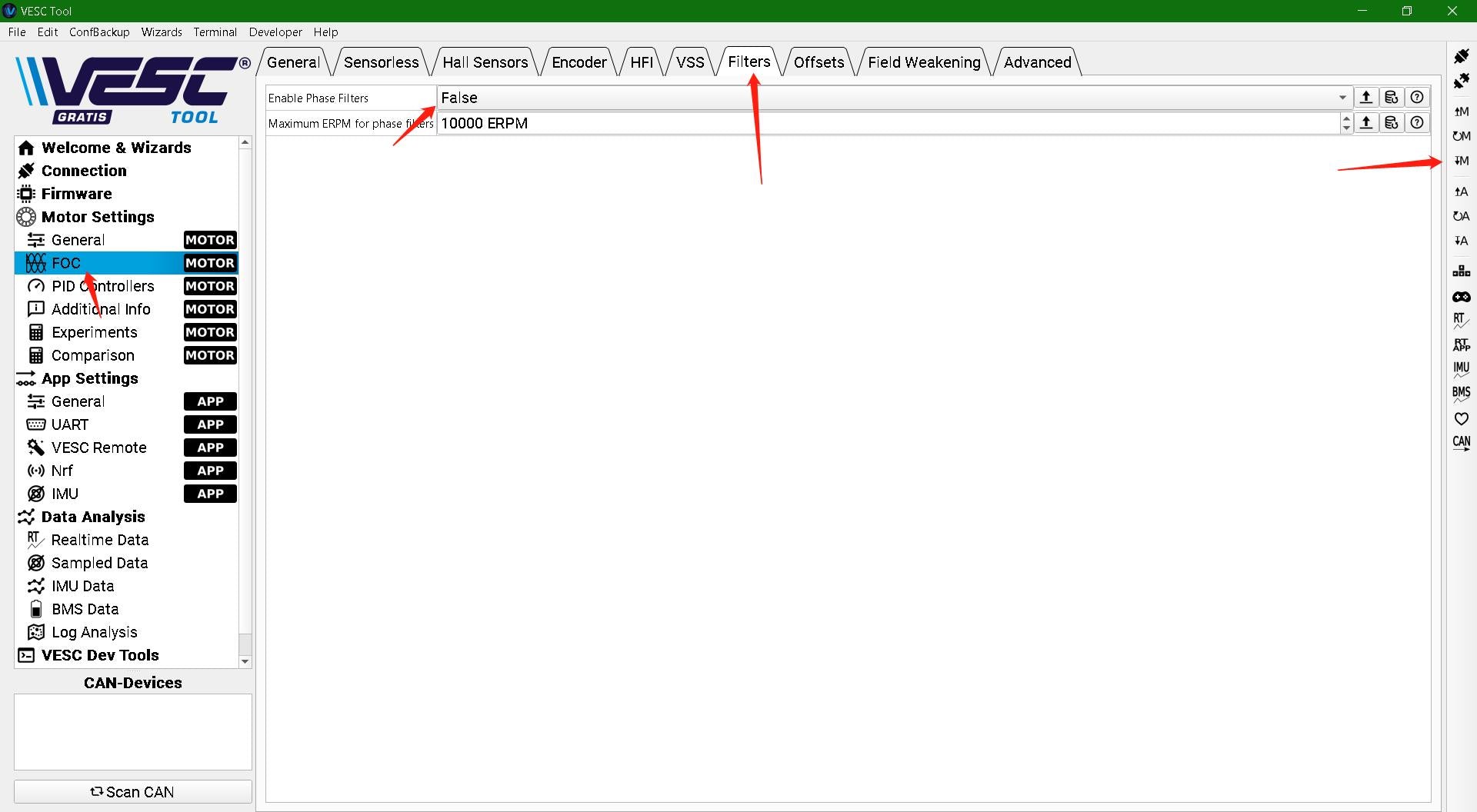
Further, disable the phase filter after the motor's FOC detection setup.
If the abs fault happens at startup, maybe disable the phase filters will help, but please enable it before FOC detection (Setup Motor's FOC ), otherwise it will get a wrong resistance at detection.
Hardware improvements(Optional) : merge the analog ground and the common ground
Hardware modification is not essential and it requires some skills for soldering, becarefull if you decided to do this part and take your own responsibility for it.
1.The analog ground of the Ubox V2.
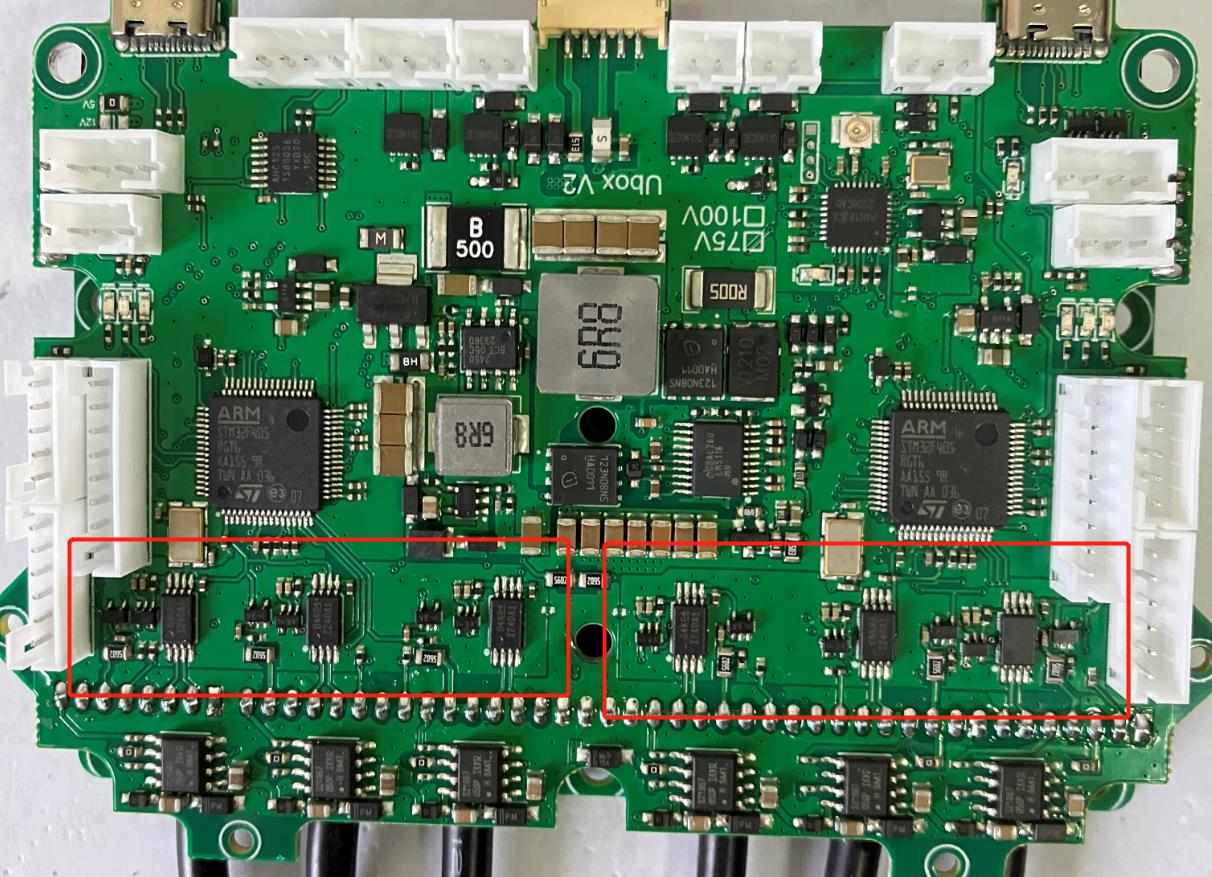
2. Use the knife to Scrape off the coating of the adjacent ground of the PCB, to let the copper of both the ground to be exposed.(Becarefull to avoid to scrape the other traces, pads, and via near them.)
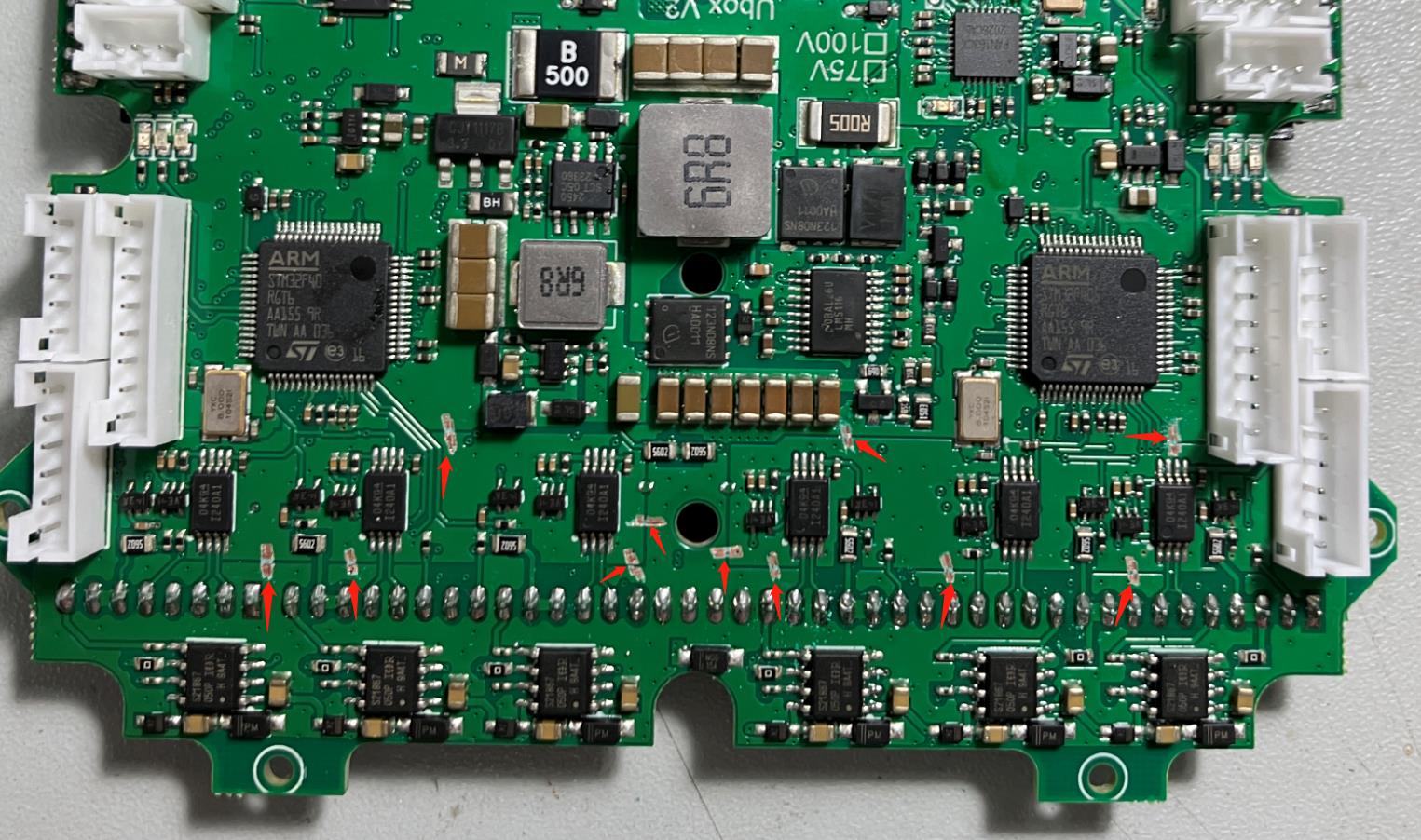
3.Use the iron to solder the exposed the copper pads, use the solder wire to bridge the adjacent coppers pads, if make the bridge is difficult, use a copper wire to solder on them to make bridge.
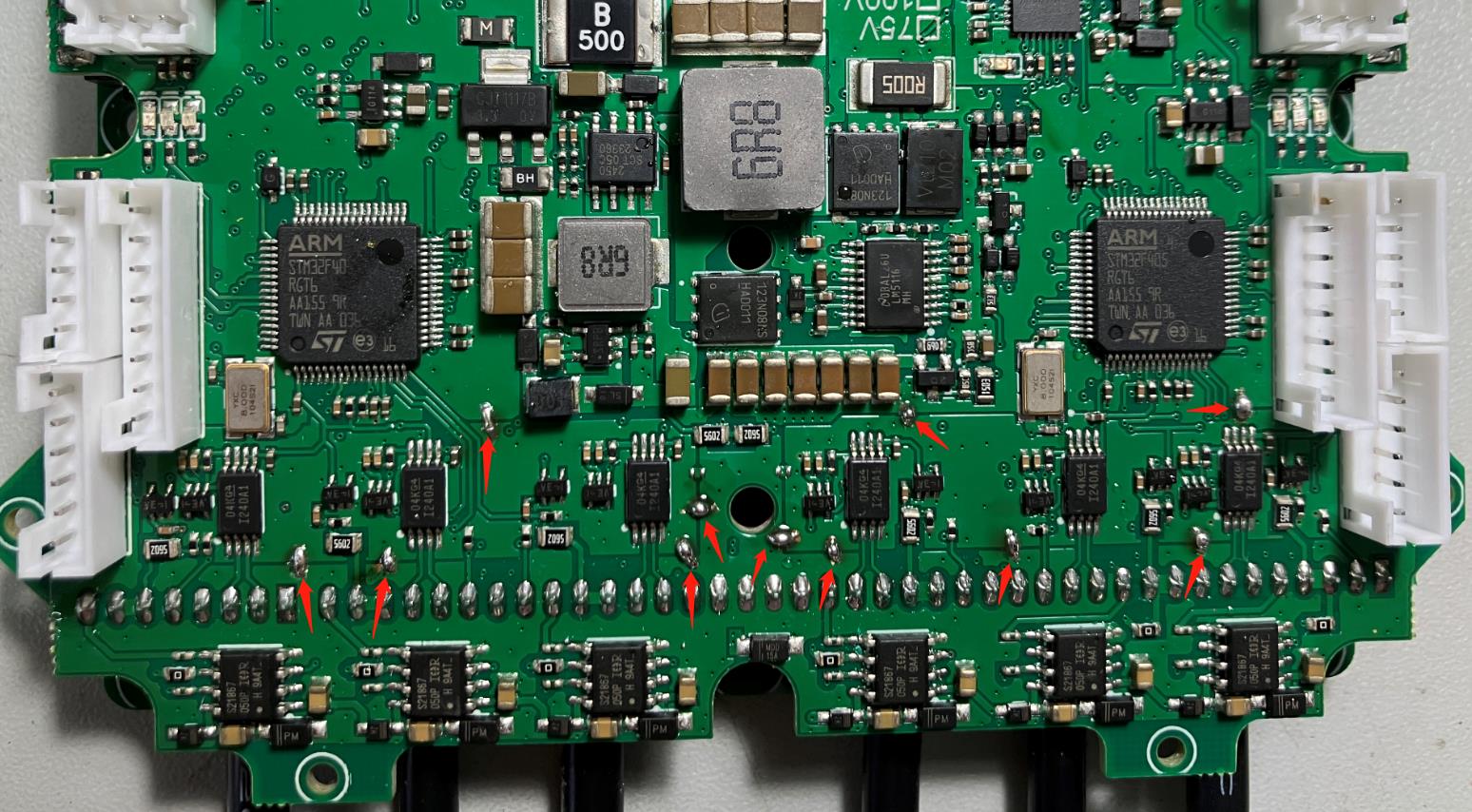
To solder them carefully, make sure the copper pads are well soldered and not shorted the other objects.
4. To check if every thing is back and fine, then re-assembly the panel, and to test if the abs over current fault is eased.
Compatibility with developing FW6.0
In our testing of the beta version of the coming FW 6.0, if in HFI mode, the "45 Deg V0 HFI" with all the firmware configurations as mentioned above is working fine in current beta firmware.
Conclusion and Explanation
- The VESC FW 5.3 is making many hardware a hard time, the main cause is that the Slow Abs Current Limit option is set to false in default with VESC FW 5.3, the purpose is: users should test if there is truly abs over current happens, then find out the cause, then we set the Slow Abs Current Limit option.
- The secondary cause is that the firmware is using the phase filter into controlling calculation now.
- Ubox V1 is powerful, but not robust enough. And it did not gives the ADC signals high priority. V2 does, and gives the ADC signals the shortest route, and with a separated ground. It works quit well with FW 5.2 in our testing and by some of our customers, but unfortunately, the Abs over current fault issue happened in fw5.3. Recently in our testing of our new 100V single Ubox, we found that the separated ground is may doing negative help.
- Ubox series products' firmware has been committed to VESC code base, in the eve of the releasing of FW 6.0. If your are trying to test the FW 6.0 with Uboxes, welcome to report the results back to us.
Cautions and Liability
- Take your own risks, and test the ESC and motor with a fuse and protecting equipment, keep every thing and every one away from the motor to avoid damage or injury.
- Since our solution is based on open source VESC, users should fully understand the risks of open source projects. This article only describes the possibility of this build method, and is not responsible for the damage and accidents caused by users themselves.
Leave a comment