





IMU module BMI 160 module for DIY balanced board with VESC
Technical Specs:
- Three axis gyro + three axis acceleration
- Working voltage: 3~5V
- Current consumption: <1mA
- Communication mode: Standard IIC/SPI communication
- Acceleration scale options: ±2g/±4g/±8g/±16g
- Gyro scale options : ±125°/s, ±250°/s, ±500°/s, ±1000°/s, ±2000°/s
- Accelerometer zero drift: ±40mg
- Gyro zero drift: ±10°/s
- Programmable frequency: 25/32Hz~1600Hz
- 6D detection and positioning
- 16-bit data output Impact resistance: 10,000 gx 200μs
- 2 independent programmable interrupt generators
- Built-in 1024 byte FIFO
- Working temperature: -40℃~+85℃
- Size: 13mmx18mm
- Pin : 2.54 pitch pin header
How to use it in VESC program? Key points reminds!
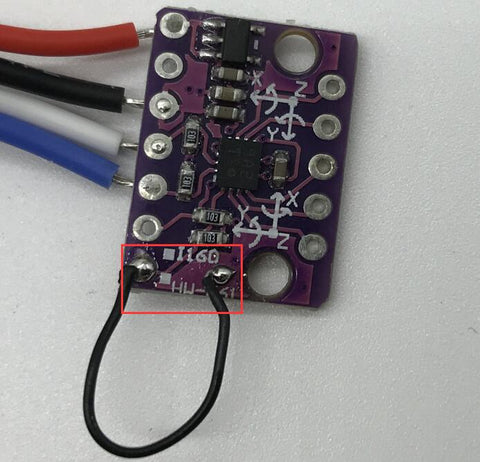
1. Before using it in vesc, needs to solder this two pin. Why to do so ?
The BMI160 is a I2C(inter-integrated circuit bus) device. To access a I2C device, the master needs a device address, for BMI160, it is 7bits address. The AD0 of BMI160 is the PIN that used for change the lowest bit of the 7bits address(in default, this bit is 0), it is useful for multiple I2C device in same bus to avoid address conflit.
VESC FW uses default address to access BMI160, so the AD0 must keeping at ground level, so in this module, connect AD0 to ground is needed.
2. If you have UART cable from VESC accessory package, you can solder it in UART Cable. Or you can also use the attached sockets pin for connection .
eg. soldered in ubox uart cable
Wiring with VESC Com Port:
BMI 160 VIN --- VESC 5V Or BMI 3V3 ----ESC 3.3V(VCC) (remark: choose either one)
BMI 160 GND ---VESC GND
BMI 160 SCL--- VESC TX
BMI 160 SDA ---VESC RX
BMI160 SA0 -- BMI160 GND

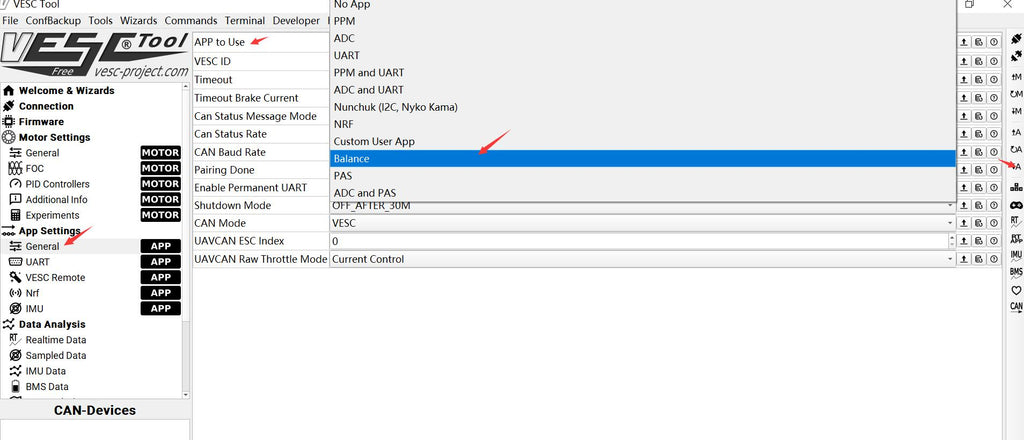
3. Connected vesc in PC VESC tool, after programming FOC motor auto detection. then do this two key steps operation:
App to Use: Balance
IMU Type: BMI160
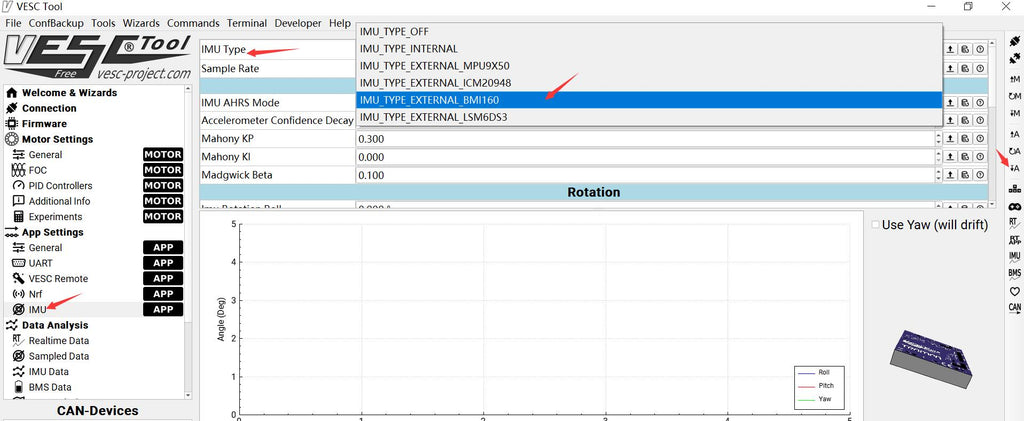
4. After writing above setting in vesc tool, the last step is to repower on your VESC, then it will be used.